- Sep 07 Fri 2007 16:54
-
ロボット
- Sep 06 Thu 2007 10:56
-
2007東元機器人競賽暨研發成果擴散活動
一、主旨:一個機器人的完成,需要整合資訊、電機、機械等專業知識;每一個
零件都需密切配合,才能讓機器人完美行動;每一個隊員均要發揮所長,互
相合作,才能創造出更加人性化的機器人,為蒐集並彙整學界技術研發成果,
與東元科技之機器人競賽共同辦理智慧型機器人成果擴散活動,建立研發成
果平台,引導學界機器人技術研發成果及作品展現、激發產業需求,並促進
零件都需密切配合,才能讓機器人完美行動;每一個隊員均要發揮所長,互
相合作,才能創造出更加人性化的機器人,為蒐集並彙整學界技術研發成果,
與東元科技之機器人競賽共同辦理智慧型機器人成果擴散活動,建立研發成
果平台,引導學界機器人技術研發成果及作品展現、激發產業需求,並促進
- Sep 05 Wed 2007 13:21
-
人型與輪型機器人核心技術
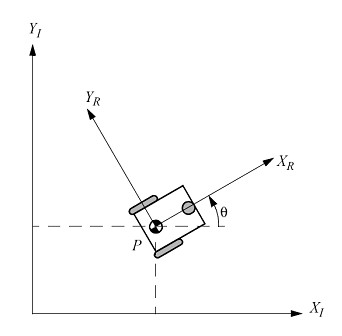
機器人可視為一複雜的機電系統,其最基本的行為能力,皆是架構在基礎的運動學之下。當運動學模型建立完成後,控制軟體則陸續架構到運動學模型之中,繼而視覺及影像辨識、環境感測、自我定位、及人工智慧…等更多的附加功能,也一一的被實現到機器人之上。然而機器人的技術核心包含上述所提及的各種技術發展,無法在短短的篇幅中一一介紹,因此,本節在此主要以市面上常見的輪型移動機器人以及仿製人的仿生二足人型機器人作為探討的對象,並針對機器人運動學做簡單的介紹。輪型機器人本文在此將透過輪子移動的機器人,定義為輪型機器人。機器人為了適應不同的環境,其機動性(Maneuverability)顯得越來越重要。然而,輪型機器人之機動性取決於移動平台(Mobile Platform)的設計。而目前應用最為廣泛的移動平台可分為差動輪系移動平台(Differential Drive Moving Platform)與全向輪系移動平台(Omni-directional Drive Moving Platform)。在此將針對兩種不同的平台系統,做簡單的運動學介紹。 一、差動輪系移動平台(Differential Drive Moving Platform)基礎的差動輪系移動平台由兩差動輪搭配一舵輪所組成,如圖一所示。此種移動平台操控簡單且穩定,為目前市面上的輪型機器人所廣為應用。其操控流程簡述如下:(1) 定義移動座標系(XR、YR)與固定座標系(XI、YI)及兩座標系的夾角。(2) 定義各差動輪的相關參數,如軸距、差動輪半徑、及差動輪旋轉角度。(3) 給定各相關參數,透過正向運動學求解移動平台移動的方向與速度。 圖一 差動輪系移動平台[27] 二、全向輪系移動平台(Omni-directional Drive Moving Platform)全向輪系移動平台由全方向性的輪子(Omni-directional Wheel)所組成,如圖二所示。此種輪子在圓周上裝有與輪軸垂直的小輪,因此可自由的沿著兩種方向移動。當驅動馬達提供動力時,全向輪沿著軸向轉動,此時與全向輪上的小輪則無作用。反之,當全向輪往輪軸方向移動時,驅動馬達則不輸出扭矩,此時全向輪上的小輪,則變為輔助輪,減少移動時的摩擦力,幫助平台移動。因此,全向平台的優點如下:(1) 輪軸不需移動,即可改變平台方向(2) 原地旋轉不需迴轉半徑(3) 可同時且獨立的控制平台的移動與轉動 圖二 全向輪系移動平台[27] 常見的全向輪系移動平台,可分為3軸與4軸兩種系統,3軸或4軸全向平台透過全向輪提供之合力與分力的組合,決定平台的移動方向,其驅動步驟流程如圖三所示,而給定全向平台運動參數後,運動模擬分析如圖四所示。
圖三 全向輪系移動平台驅動步驟流程圖 平台夾角:30度;平台移動速度:0.45(m/s);平台移動方向:45度;
轉動時間:5s;整體移動時間:10s;平台初始方向:-30度
- Aug 27 Mon 2007 09:39
-
創造機械人熱潮,Toyota新一代導覽機械人月底服役

近日由電影「變形金剛」所掀起的機械人風潮已席捲全球,影片中能在汽車與機械人之間,自由形變的外星機械人,雖然是出自機械的科幻想像。不過,當今的車廠,對於機械人的開發也不無進展,其中,又以日本車廠最具代表性。
在全球車壇已擁有高知名度的機械人,即是Honda類人型機器人Asimo。近年頻繁現身國際性車展的Asimo,最大的特色,在於具備人類雙足行走能力的類人型機器人,搭配先進人工智慧,可依據人類的聲音、手勢等指令,進行雙方互動,讓Asimo成為Honda展現科技水準的活廣告。
現在,不讓Honda的Asimo專美於前,身為日系龍頭車廠Toyota,已於8月22日宣佈,成功開發最新型的導覽機械人,將於8月27日開始,進駐愛知縣豐田市的Toyota展覽館 (Toyota Kaikan Exhibition Hall) ,擔任展場導覽機械人職務,引領來自全球的訪客,瞭解Toyota集團的發展版圖與最新技術。
- Aug 21 Tue 2007 15:51
-
機器人的配備
- Jul 27 Fri 2007 12:28
-
03年商品.(日系)

- Jul 25 Wed 2007 13:27
-
日商來台找代理.有錢有閒請出列!!
日本知名機器人廠商(TMSUK)著眼於台灣在電子資訊產業的領先地位,擬來台洽談合作廠商,
進行產品開發生產與行銷的合作計畫,預計於8月7日與8月8日假台北市外貿協會會址進行"技術交流說明會"及"一對一商談會",
歡迎各位先進報名參加(本活動需事先報名經貿協確認始得出席)~相關活動資訊與廠商資料請參閱附件說明~
本次日商來台洽談合作廠商活動乃由外貿協會主辦,本單位協助提供國內機器人產業資訊與國內廠商聯繫~
- Jul 21 Sat 2007 12:24
-
JP立法防機器人“造反”
在機器人技術最發達的日本,日本經濟產業省正在起草一份詳細的機器人行為規範守則,規範機器人的行為。
機器人會“造反”? 這絕對不是杞人憂天。提起機器人,很多人都會嚮往未來由機器人代替人類勞動的世界,但也有人擔心會出現美國科幻電影《我,機器人》中機器人造反的場景。因為機器人一旦“不聽話”,人類的血肉之軀可抵擋不住機器人的鋼筋鐵骨。
- Jul 21 Sat 2007 12:05
-
感應器之應用
感應器在此是指一種根據基本物理特性來偵測是否有人員存在的器具。例如,它可以偵測出壓力、溫度、位移、或者是電場等物理特性之改變。感應器有的可直接接觸或放置於元件上,有的則是置放於某個偵測區域之內。可用於機器人安全防護所使用之感應器裝置有:壓力感覺墊、紅外線、電容器、微波、超音波、磁場、影像、磁感式、慣性式等。
各種感應器均有其優劣之處,必須要使感應器使用在其可以發展其長處的工作環境才可以,所以應當選擇適合使用環境者來加以利用。
各種感應器均有其優劣之處,必須要使感應器使用在其可以發展其長處的工作環境才可以,所以應當選擇適合使用環境者來加以利用。
- Jul 21 Sat 2007 12:04
-
警告系統之應用
警告系統之始用大致上可分為下列數類:
標示:在機器人工作區域(等級一防護區域)之外,宜設置柵欄或其他足以阻檔人員進入之障礙物,並於明顯易見之處設置清楚之標示,以說明機器人安全上應注意之事項,並警告人員不得任易進入工作區域內。
聲音警示:在人員進入機器人工作區域時(等級一與等級二防護區域),宜有感應器偵測之並提供聲音警示,以維護人員安全。
安全監控人員與警告系統:在機器人工作區域之外之安全區內,在視野清晰之處宜設置安全監控人員,以隨時觀察機器人與操作人員之互動情形。安全監控人員宜配有緊急停止裝置或相關安全系統,以便在危害即將發生時之使用。安全監控人員在察覺人員之不當操作或進入危險區域時,宜應隨時予以口頭警示,以確保人員之安全作業。
- Jul 21 Sat 2007 12:03
-
互鎖迴路
機器人可安裝互鎖裝置(Interlocking Device)以維護人員安全。互鎖裝置係指機械式、電子式、或其他可防止機器人在安全防護系統未啟動時會作用的裝置。所以當安全系統未啟動時,此互鎖裝置會利用一些方法,如將其斷電、或使機器人之致動器停止等,使機器人無法動作。機器人互鎖迴路之運作邏輯如下圖所示。
在一些工廠中,有些機器人則在工作區域外裝置安全門或其他裝置,使機器人與之產生互鎖迴路之關係,如此人員一但在闖入機器人之工作區域時,安全裝置被開啟,則機器人會自動停止運作。
在使用互鎖裝置時,宜確時注意到工作人員不可隨意將裝置關掉,除了遇有維修、檢驗、或測試等特殊情況,且在具專人在工作區域外之監控下,方可關掉互鎖裝置進行之。