機器人可視為一複雜的機電系統,其最基本的行為能力,皆是架構在基礎的運動學之下。當運動學模型建立完成後,控制軟體則陸續架構到運動學模型之中,繼而視覺及影像辨識、環境感測、自我定位、及人工智慧…等更多的附加功能,也一一的被實現到機器人之上。然而機器人的技術核心包含上述所提及的各種技術發展,無法在短短的篇幅中一一介紹,因此,本節在此主要以市面上常見的輪型移動機器人以及仿製人的仿生二足人型機器人作為探討的對象,並針對機器人運動學做簡單的介紹。輪型機器人本文在此將透過輪子移動的機器人,定義為輪型機器人。機器人為了適應不同的環境,其機動性(Maneuverability)顯得越來越重要。然而,輪型機器人之機動性取決於移動平台(Mobile Platform)的設計。而目前應用最為廣泛的移動平台可分為差動輪系移動平台(Differential Drive Moving Platform)與全向輪系移動平台(Omni-directional Drive Moving Platform)。在此將針對兩種不同的平台系統,做簡單的運動學介紹。 一、差動輪系移動平台(Differential Drive Moving Platform)基礎的差動輪系移動平台由兩差動輪搭配一舵輪所組成,如圖一所示。此種移動平台操控簡單且穩定,為目前市面上的輪型機器人所廣為應用。其操控流程簡述如下:(1) 定義移動座標系(XR、YR)與固定座標系(XI、YI)及兩座標系的夾角。(2) 定義各差動輪的相關參數,如軸距、差動輪半徑、及差動輪旋轉角度。(3) 給定各相關參數,透過正向運動學求解移動平台移動的方向與速度。 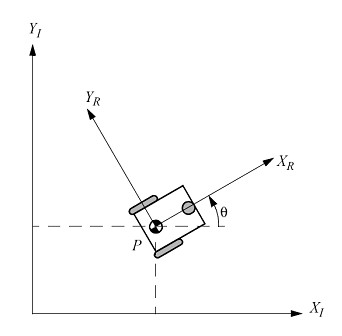 圖一 差動輪系移動平台[27] 二、全向輪系移動平台(Omni-directional Drive Moving Platform)全向輪系移動平台由全方向性的輪子(Omni-directional Wheel)所組成,如圖二所示。此種輪子在圓周上裝有與輪軸垂直的小輪,因此可自由的沿著兩種方向移動。當驅動馬達提供動力時,全向輪沿著軸向轉動,此時與全向輪上的小輪則無作用。反之,當全向輪往輪軸方向移動時,驅動馬達則不輸出扭矩,此時全向輪上的小輪,則變為輔助輪,減少移動時的摩擦力,幫助平台移動。因此,全向平台的優點如下:(1) 輪軸不需移動,即可改變平台方向(2) 原地旋轉不需迴轉半徑(3) 可同時且獨立的控制平台的移動與轉動
圖一 差動輪系移動平台[27] 二、全向輪系移動平台(Omni-directional Drive Moving Platform)全向輪系移動平台由全方向性的輪子(Omni-directional Wheel)所組成,如圖二所示。此種輪子在圓周上裝有與輪軸垂直的小輪,因此可自由的沿著兩種方向移動。當驅動馬達提供動力時,全向輪沿著軸向轉動,此時與全向輪上的小輪則無作用。反之,當全向輪往輪軸方向移動時,驅動馬達則不輸出扭矩,此時全向輪上的小輪,則變為輔助輪,減少移動時的摩擦力,幫助平台移動。因此,全向平台的優點如下:(1) 輪軸不需移動,即可改變平台方向(2) 原地旋轉不需迴轉半徑(3) 可同時且獨立的控制平台的移動與轉動 圖二 全向輪系移動平台[27] 常見的全向輪系移動平台,可分為3軸與4軸兩種系統,3軸或4軸全向平台透過全向輪提供之合力與分力的組合,決定平台的移動方向,其驅動步驟流程如圖三所示,而給定全向平台運動參數後,運動模擬分析如圖四所示。
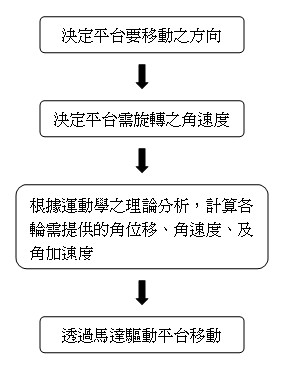
圖二 全向輪系移動平台[27] 常見的全向輪系移動平台,可分為3軸與4軸兩種系統,3軸或4軸全向平台透過全向輪提供之合力與分力的組合,決定平台的移動方向,其驅動步驟流程如圖三所示,而給定全向平台運動參數後,運動模擬分析如圖四所示。
圖三 全向輪系移動平台驅動步驟流程圖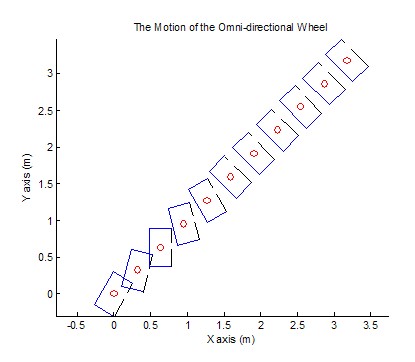 圖四 全向輪系移動平台運動模擬
由於全方位之移動平台之機動性高,可沿著側向移動而不需改變平台之轉向,所以,目前已廣泛的被各國應用在國際中型足球機器人比賽(Middle Size League of RoboCup)之中,讓足球機器人可以快速且順暢的追逐比賽中的球,增加比賽的複雜度與可看性。因此,全方位移動平台,未來勢必成為高機動性機器人需選用的平台之一。
人型機器人
本文在此將具有類似人類形體架構的機器人,稱為人型機器人。而人型機器人與輪型機器人的最大差異性就是『平衡』。輪型機器人,透過3個以上的輪子,使自身永遠保持在平衡的條件下運動;但人型機器人只以兩條腿部機構來運動,且重心較輪型機器人高,所以在移動時,重心的變化較輪型機器人產生較大的搖晃,影響機器人的平衡,因此,本文在此將簡單介紹人型機器人的運動學。人型機器人的運動學,共可分成幾個部份,分別為:
(1) 模型的建立;
(2) 正向運動學(Forward Kinematics);
(3) 逆向運動學(Inverse Kinematics);
(4) ZMP;
(5) 雙足步行。
一、模型的建立
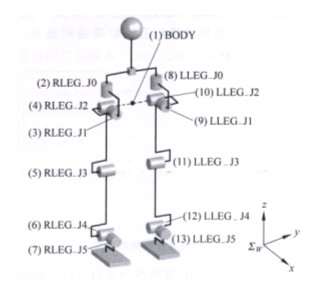
任何會運動的機構都需要建立其數學模型,機器人也不例外。本文在此以圖五,具有12個自由度的雙足步行機器人為例,建立其連桿的名稱與編號,圖中圓柱體皆為旋轉肘,用以代表人的關節。而每一個關節都附有一個驅動器,因此透過驅動器驅使關節,使關節產生角度(旋轉角度)的變化,連帶使連桿產生運動,將可控制機器人的運動。
圖四 全向輪系移動平台運動模擬
由於全方位之移動平台之機動性高,可沿著側向移動而不需改變平台之轉向,所以,目前已廣泛的被各國應用在國際中型足球機器人比賽(Middle Size League of RoboCup)之中,讓足球機器人可以快速且順暢的追逐比賽中的球,增加比賽的複雜度與可看性。因此,全方位移動平台,未來勢必成為高機動性機器人需選用的平台之一。
人型機器人
本文在此將具有類似人類形體架構的機器人,稱為人型機器人。而人型機器人與輪型機器人的最大差異性就是『平衡』。輪型機器人,透過3個以上的輪子,使自身永遠保持在平衡的條件下運動;但人型機器人只以兩條腿部機構來運動,且重心較輪型機器人高,所以在移動時,重心的變化較輪型機器人產生較大的搖晃,影響機器人的平衡,因此,本文在此將簡單介紹人型機器人的運動學。人型機器人的運動學,共可分成幾個部份,分別為:
(1) 模型的建立;
(2) 正向運動學(Forward Kinematics);
(3) 逆向運動學(Inverse Kinematics);
(4) ZMP;
(5) 雙足步行。
一、模型的建立
任何會運動的機構都需要建立其數學模型,機器人也不例外。本文在此以圖五,具有12個自由度的雙足步行機器人為例,建立其連桿的名稱與編號,圖中圓柱體皆為旋轉肘,用以代表人的關節。而每一個關節都附有一個驅動器,因此透過驅動器驅使關節,使關節產生角度(旋轉角度)的變化,連帶使連桿產生運動,將可控制機器人的運動。
 圖五 具12自由度雙足步行機器人[26]
二、正向運動學(Forward Kinematics)
正向運動學(Forward Kinematics)是根據每個關節的旋轉角度來計算相對應連桿的姿勢。通常用於機器人重心的計算、機器人狀態的圖形描述、以及與環境碰撞的判定等情況,是機器人仿生運動的基礎。
圖六為任意給定12個關節角度後(給定的旋轉角度要在關節可運動的範圍內),機器人所產生的姿勢。由圖中可知,簡單的連桿與旋轉接頭即可使機器人產生複雜的動作。
圖五 具12自由度雙足步行機器人[26]
二、正向運動學(Forward Kinematics)
正向運動學(Forward Kinematics)是根據每個關節的旋轉角度來計算相對應連桿的姿勢。通常用於機器人重心的計算、機器人狀態的圖形描述、以及與環境碰撞的判定等情況,是機器人仿生運動的基礎。
圖六為任意給定12個關節角度後(給定的旋轉角度要在關節可運動的範圍內),機器人所產生的姿勢。由圖中可知,簡單的連桿與旋轉接頭即可使機器人產生複雜的動作。
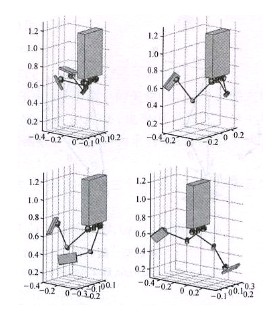 圖六 正向運動學模擬結果[26]
三、逆向運動學(Inverse Kinematics)
逆向運動學(Inverse Kinematics)是根據機器人的軀體以及足部的姿勢來求解各關節所轉動的角度。常用於機器人上下樓梯的情形之下,透過視覺量測階梯的高度等參數後,對機器人應當產生的抬腳高度及落腳地點的控制就需要用到逆向運動學,而逆向運動學的求解方法則可透過解析法與數值法來求解。
四、ZMP(Zero Moment Point)
一般工業用機器人的底座是固定在地面上的,而人型機器人的足底(腳板)則是與地面接觸而不固定,因此在運動的過程中,要保持至少一足部與地面接觸的限制條件,然而在移動的過程中,要使機器人不會產生跌倒的力矩,就需要用到ZMP(Zero Moment Point)。ZMP又稱為零力矩點,為1972年Vukobratovic和Stepanenko提出的一篇與人型機器人相關的論文中所定義。
圖六 正向運動學模擬結果[26]
三、逆向運動學(Inverse Kinematics)
逆向運動學(Inverse Kinematics)是根據機器人的軀體以及足部的姿勢來求解各關節所轉動的角度。常用於機器人上下樓梯的情形之下,透過視覺量測階梯的高度等參數後,對機器人應當產生的抬腳高度及落腳地點的控制就需要用到逆向運動學,而逆向運動學的求解方法則可透過解析法與數值法來求解。
四、ZMP(Zero Moment Point)
一般工業用機器人的底座是固定在地面上的,而人型機器人的足底(腳板)則是與地面接觸而不固定,因此在運動的過程中,要保持至少一足部與地面接觸的限制條件,然而在移動的過程中,要使機器人不會產生跌倒的力矩,就需要用到ZMP(Zero Moment Point)。ZMP又稱為零力矩點,為1972年Vukobratovic和Stepanenko提出的一篇與人型機器人相關的論文中所定義。
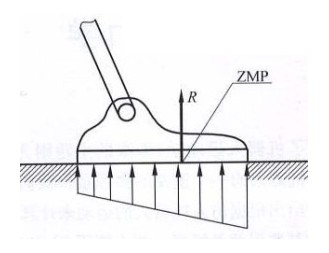 圖七 機器人足底所作用力的分布[26]
圖七為機器人足底所受作用力的分布情形,沿足底所受的作用力之合力,等效於一合力R,其作用點在足底的範圍之內。合力R所通過在足底的作用點則稱為零力矩點(ZMP)。而與ZMP關係密切的還有另一個概念,支撐多邊型。考慮包含機器人足底與地面之間所有接觸點的最小多邊型區域,稱為支撐多邊型。圖八說明人站在地面上時,重心、ZMP、與支撐多邊形的位置關係。其中通過重心的垂直線與地面相交的點,稱為重心投影點。如圖八(a)表示,當人直立時,其ZMP與重心投影點重合,在此情形下,如果重心投影點嚴格的限制在支撐多邊形內,則人可以保持平衡;另一方面,當人在動態的情形下,重心投影點可能落在支撐多邊形之外,但ZMP仍然需要處在支撐多邊形之內,才可保持平衡,如圖八(b)所示。
圖七 機器人足底所作用力的分布[26]
圖七為機器人足底所受作用力的分布情形,沿足底所受的作用力之合力,等效於一合力R,其作用點在足底的範圍之內。合力R所通過在足底的作用點則稱為零力矩點(ZMP)。而與ZMP關係密切的還有另一個概念,支撐多邊型。考慮包含機器人足底與地面之間所有接觸點的最小多邊型區域,稱為支撐多邊型。圖八說明人站在地面上時,重心、ZMP、與支撐多邊形的位置關係。其中通過重心的垂直線與地面相交的點,稱為重心投影點。如圖八(a)表示,當人直立時,其ZMP與重心投影點重合,在此情形下,如果重心投影點嚴格的限制在支撐多邊形內,則人可以保持平衡;另一方面,當人在動態的情形下,重心投影點可能落在支撐多邊形之外,但ZMP仍然需要處在支撐多邊形之內,才可保持平衡,如圖八(b)所示。
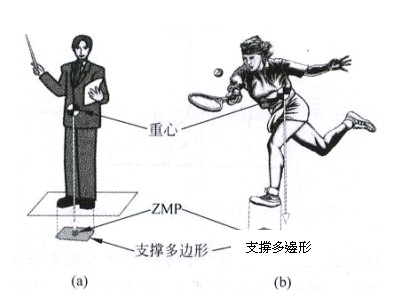 圖八 重心、ZMP、與支撐多邊形之關係[26]
五、雙足步行
牛津高階英語辭典中對步行下過明確的定義如下:「Walk:Move along at a moderate pace by lifting up and putting down each foot in turn, so that one foot is on ground while the other is being lifted.」
根據此定義,在步行的過程中的任何時刻,至少有一隻腳與地面接觸,且有兩種不同的步行方式,分為靜態步行與動態步行。在靜態步行中,機器人的質心在地面上的投影始終不超越支撐多邊型的範圍;而在動態步行中,質心的投影在某些時刻可以離開支撐多邊型。
大部分的雙足步行機器人只透過大腳板進行靜態步行,但正常人是透過動態步行來移動的,人們習以為常的步行方式可以透過自主控制,來達成全身的平衡,因此,機器人也需要透過控制的方法來達成自體的平衡。然而,控制的方法種類繁多各有所長,因此,本文列舉參考文獻[26]所提出的自體平衡控制的框架,如圖九所示,並不探討控制的內容。
圖八 重心、ZMP、與支撐多邊形之關係[26]
五、雙足步行
牛津高階英語辭典中對步行下過明確的定義如下:「Walk:Move along at a moderate pace by lifting up and putting down each foot in turn, so that one foot is on ground while the other is being lifted.」
根據此定義,在步行的過程中的任何時刻,至少有一隻腳與地面接觸,且有兩種不同的步行方式,分為靜態步行與動態步行。在靜態步行中,機器人的質心在地面上的投影始終不超越支撐多邊型的範圍;而在動態步行中,質心的投影在某些時刻可以離開支撐多邊型。
大部分的雙足步行機器人只透過大腳板進行靜態步行,但正常人是透過動態步行來移動的,人們習以為常的步行方式可以透過自主控制,來達成全身的平衡,因此,機器人也需要透過控制的方法來達成自體的平衡。然而,控制的方法種類繁多各有所長,因此,本文列舉參考文獻[26]所提出的自體平衡控制的框架,如圖九所示,並不探討控制的內容。
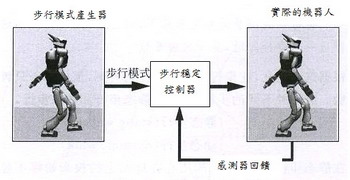 圖九 自體平衡控制的框架[26]
綜合以上所述,人型機器人的發展仍然較輪型機器人困難,在動態平衡的研究仍有努力的空間。而本文在此只簡述輪型與人型機器人的在運動學部分的核心技術,不列出艱深的數學理論與方程式,期望給讀者簡單的概念,對機器人的發展有進一步的認知。
結論
目前全世界機器人的研究、產品與相關新聞越來越多,機器人這個辭彙也從科幻和電影題材轉變為生活的一部份,人型機器人與輪型機器人兩種不同的設計理念,都有許多研究在進行,相信未來有一天會將兩者結合,成為一種最終的機器人形態(變形金剛?)。看著各式別具巧思的應用出現在你我身旁,讓我們不禁對未來多了一份期望:不知道艾西莫夫筆下的遠景會在哪一天實現。
誌謝
本文研究成果主要來自經濟部技術處“智慧機器人技術研究發展”科技專案計畫。
參考文獻
[1]http://www.kepu.net.cn/gb/technology/robot/secret/sec102.html
[2]http://asweb_o.asiaa.sinica.edu.tw/modules/news/
[3]http://chinese.engadget.com/
[4]http://cosmos2.blogspot.com/
[5]http://marsrovers.jpl.nasa.gov/home/index.html
[6]http://people.csail.mit.edu/edsinger/domo.htm
[7]http://robowars.org/index.html
[8]http://store.irobot.com/home/index.jsp
[9]http://toyota.jp/
[10]http://www.allenvanguard.co.uk/
[11]http://www.alsok.co.jp/index.html
[12]http://www.drrobot.com/
[13]http://www.ed.ams.eng.osaka-u.ac.jp/
[14]http://www.fira.net/index.html
[15]http://www.honda.co.jp/ASIMO/
[16]http://www.isobotrobot.com/
[17]http://www.kawada.co.jp/mechs/hrp-3p/index.html
[18]http://www.kyosho.com/
[19]http://www.lexus.com.tw/
[20]http://www.plen.jp/
[21]http://www.robocup-us.org/index.html
[22]http://www.robo-one.com/what/what.html
[23]http://www.robotdiy.com/article.php?sid=136
[24]http://www.takaratomy.co.jp/
[25]http://www.vecnarobotics.com/
[26]?田秀司編著,管貽生譯,2007,“仿人機器人”,清華大學出版社,北京。
[27]Roland Siegwart and Illah R. Nourbakhsh,2004,Introduction to Autonomous Mobile Robots Cambridge, Mass。
圖九 自體平衡控制的框架[26]
綜合以上所述,人型機器人的發展仍然較輪型機器人困難,在動態平衡的研究仍有努力的空間。而本文在此只簡述輪型與人型機器人的在運動學部分的核心技術,不列出艱深的數學理論與方程式,期望給讀者簡單的概念,對機器人的發展有進一步的認知。
結論
目前全世界機器人的研究、產品與相關新聞越來越多,機器人這個辭彙也從科幻和電影題材轉變為生活的一部份,人型機器人與輪型機器人兩種不同的設計理念,都有許多研究在進行,相信未來有一天會將兩者結合,成為一種最終的機器人形態(變形金剛?)。看著各式別具巧思的應用出現在你我身旁,讓我們不禁對未來多了一份期望:不知道艾西莫夫筆下的遠景會在哪一天實現。
誌謝
本文研究成果主要來自經濟部技術處“智慧機器人技術研究發展”科技專案計畫。
參考文獻
[1]http://www.kepu.net.cn/gb/technology/robot/secret/sec102.html
[2]http://asweb_o.asiaa.sinica.edu.tw/modules/news/
[3]http://chinese.engadget.com/
[4]http://cosmos2.blogspot.com/
[5]http://marsrovers.jpl.nasa.gov/home/index.html
[6]http://people.csail.mit.edu/edsinger/domo.htm
[7]http://robowars.org/index.html
[8]http://store.irobot.com/home/index.jsp
[9]http://toyota.jp/
[10]http://www.allenvanguard.co.uk/
[11]http://www.alsok.co.jp/index.html
[12]http://www.drrobot.com/
[13]http://www.ed.ams.eng.osaka-u.ac.jp/
[14]http://www.fira.net/index.html
[15]http://www.honda.co.jp/ASIMO/
[16]http://www.isobotrobot.com/
[17]http://www.kawada.co.jp/mechs/hrp-3p/index.html
[18]http://www.kyosho.com/
[19]http://www.lexus.com.tw/
[20]http://www.plen.jp/
[21]http://www.robocup-us.org/index.html
[22]http://www.robo-one.com/what/what.html
[23]http://www.robotdiy.com/article.php?sid=136
[24]http://www.takaratomy.co.jp/
[25]http://www.vecnarobotics.com/
[26]?田秀司編著,管貽生譯,2007,“仿人機器人”,清華大學出版社,北京。
[27]Roland Siegwart and Illah R. Nourbakhsh,2004,Introduction to Autonomous Mobile Robots Cambridge, Mass。
圖一 差動輪系移動平台[27] 二、全向輪系移動平台(Omni-directional Drive Moving Platform)全向輪系移動平台由全方向性的輪子(Omni-directional Wheel)所組成,如圖二所示。此種輪子在圓周上裝有與輪軸垂直的小輪,因此可自由的沿著兩種方向移動。當驅動馬達提供動力時,全向輪沿著軸向轉動,此時與全向輪上的小輪則無作用。反之,當全向輪往輪軸方向移動時,驅動馬達則不輸出扭矩,此時全向輪上的小輪,則變為輔助輪,減少移動時的摩擦力,幫助平台移動。因此,全向平台的優點如下:(1) 輪軸不需移動,即可改變平台方向(2) 原地旋轉不需迴轉半徑(3) 可同時且獨立的控制平台的移動與轉動 圖二 全向輪系移動平台[27] 常見的全向輪系移動平台,可分為3軸與4軸兩種系統,3軸或4軸全向平台透過全向輪提供之合力與分力的組合,決定平台的移動方向,其驅動步驟流程如圖三所示,而給定全向平台運動參數後,運動模擬分析如圖四所示。 圖三 全向輪系移動平台驅動步驟流程圖
平台夾角:30度;平台移動速度:0.45(m/s);平台移動方向:45度;
轉動時間:5s;整體移動時間:10s;平台初始方向:-30度
圖四 全向輪系移動平台運動模擬
由於全方位之移動平台之機動性高,可沿著側向移動而不需改變平台之轉向,所以,目前已廣泛的被各國應用在國際中型足球機器人比賽(Middle Size League of RoboCup)之中,讓足球機器人可以快速且順暢的追逐比賽中的球,增加比賽的複雜度與可看性。因此,全方位移動平台,未來勢必成為高機動性機器人需選用的平台之一。
人型機器人
本文在此將具有類似人類形體架構的機器人,稱為人型機器人。而人型機器人與輪型機器人的最大差異性就是『平衡』。輪型機器人,透過3個以上的輪子,使自身永遠保持在平衡的條件下運動;但人型機器人只以兩條腿部機構來運動,且重心較輪型機器人高,所以在移動時,重心的變化較輪型機器人產生較大的搖晃,影響機器人的平衡,因此,本文在此將簡單介紹人型機器人的運動學。人型機器人的運動學,共可分成幾個部份,分別為:
(1) 模型的建立;
(2) 正向運動學(Forward Kinematics);
(3) 逆向運動學(Inverse Kinematics);
(4) ZMP;
(5) 雙足步行。
一、模型的建立
任何會運動的機構都需要建立其數學模型,機器人也不例外。本文在此以圖五,具有12個自由度的雙足步行機器人為例,建立其連桿的名稱與編號,圖中圓柱體皆為旋轉肘,用以代表人的關節。而每一個關節都附有一個驅動器,因此透過驅動器驅使關節,使關節產生角度(旋轉角度)的變化,連帶使連桿產生運動,將可控制機器人的運動。
圖五 具12自由度雙足步行機器人[26]
二、正向運動學(Forward Kinematics)
正向運動學(Forward Kinematics)是根據每個關節的旋轉角度來計算相對應連桿的姿勢。通常用於機器人重心的計算、機器人狀態的圖形描述、以及與環境碰撞的判定等情況,是機器人仿生運動的基礎。
圖六為任意給定12個關節角度後(給定的旋轉角度要在關節可運動的範圍內),機器人所產生的姿勢。由圖中可知,簡單的連桿與旋轉接頭即可使機器人產生複雜的動作。
圖六 正向運動學模擬結果[26]
三、逆向運動學(Inverse Kinematics)
逆向運動學(Inverse Kinematics)是根據機器人的軀體以及足部的姿勢來求解各關節所轉動的角度。常用於機器人上下樓梯的情形之下,透過視覺量測階梯的高度等參數後,對機器人應當產生的抬腳高度及落腳地點的控制就需要用到逆向運動學,而逆向運動學的求解方法則可透過解析法與數值法來求解。
四、ZMP(Zero Moment Point)
一般工業用機器人的底座是固定在地面上的,而人型機器人的足底(腳板)則是與地面接觸而不固定,因此在運動的過程中,要保持至少一足部與地面接觸的限制條件,然而在移動的過程中,要使機器人不會產生跌倒的力矩,就需要用到ZMP(Zero Moment Point)。ZMP又稱為零力矩點,為1972年Vukobratovic和Stepanenko提出的一篇與人型機器人相關的論文中所定義。
圖七 機器人足底所作用力的分布[26]
圖七為機器人足底所受作用力的分布情形,沿足底所受的作用力之合力,等效於一合力R,其作用點在足底的範圍之內。合力R所通過在足底的作用點則稱為零力矩點(ZMP)。而與ZMP關係密切的還有另一個概念,支撐多邊型。考慮包含機器人足底與地面之間所有接觸點的最小多邊型區域,稱為支撐多邊型。圖八說明人站在地面上時,重心、ZMP、與支撐多邊形的位置關係。其中通過重心的垂直線與地面相交的點,稱為重心投影點。如圖八(a)表示,當人直立時,其ZMP與重心投影點重合,在此情形下,如果重心投影點嚴格的限制在支撐多邊形內,則人可以保持平衡;另一方面,當人在動態的情形下,重心投影點可能落在支撐多邊形之外,但ZMP仍然需要處在支撐多邊形之內,才可保持平衡,如圖八(b)所示。
圖八 重心、ZMP、與支撐多邊形之關係[26]
五、雙足步行
牛津高階英語辭典中對步行下過明確的定義如下:「Walk:Move along at a moderate pace by lifting up and putting down each foot in turn, so that one foot is on ground while the other is being lifted.」
根據此定義,在步行的過程中的任何時刻,至少有一隻腳與地面接觸,且有兩種不同的步行方式,分為靜態步行與動態步行。在靜態步行中,機器人的質心在地面上的投影始終不超越支撐多邊型的範圍;而在動態步行中,質心的投影在某些時刻可以離開支撐多邊型。
大部分的雙足步行機器人只透過大腳板進行靜態步行,但正常人是透過動態步行來移動的,人們習以為常的步行方式可以透過自主控制,來達成全身的平衡,因此,機器人也需要透過控制的方法來達成自體的平衡。然而,控制的方法種類繁多各有所長,因此,本文列舉參考文獻[26]所提出的自體平衡控制的框架,如圖九所示,並不探討控制的內容。
圖九 自體平衡控制的框架[26]
綜合以上所述,人型機器人的發展仍然較輪型機器人困難,在動態平衡的研究仍有努力的空間。而本文在此只簡述輪型與人型機器人的在運動學部分的核心技術,不列出艱深的數學理論與方程式,期望給讀者簡單的概念,對機器人的發展有進一步的認知。
結論
目前全世界機器人的研究、產品與相關新聞越來越多,機器人這個辭彙也從科幻和電影題材轉變為生活的一部份,人型機器人與輪型機器人兩種不同的設計理念,都有許多研究在進行,相信未來有一天會將兩者結合,成為一種最終的機器人形態(變形金剛?)。看著各式別具巧思的應用出現在你我身旁,讓我們不禁對未來多了一份期望:不知道艾西莫夫筆下的遠景會在哪一天實現。
誌謝
本文研究成果主要來自經濟部技術處“智慧機器人技術研究發展”科技專案計畫。
參考文獻
[1]http://www.kepu.net.cn/gb/technology/robot/secret/sec102.html
[2]http://asweb_o.asiaa.sinica.edu.tw/modules/news/
[3]http://chinese.engadget.com/
[4]http://cosmos2.blogspot.com/
[5]http://marsrovers.jpl.nasa.gov/home/index.html
[6]http://people.csail.mit.edu/edsinger/domo.htm
[7]http://robowars.org/index.html
[8]http://store.irobot.com/home/index.jsp
[9]http://toyota.jp/
[10]http://www.allenvanguard.co.uk/
[11]http://www.alsok.co.jp/index.html
[12]http://www.drrobot.com/
[13]http://www.ed.ams.eng.osaka-u.ac.jp/
[14]http://www.fira.net/index.html
[15]http://www.honda.co.jp/ASIMO/
[16]http://www.isobotrobot.com/
[17]http://www.kawada.co.jp/mechs/hrp-3p/index.html
[18]http://www.kyosho.com/
[19]http://www.lexus.com.tw/
[20]http://www.plen.jp/
[21]http://www.robocup-us.org/index.html
[22]http://www.robo-one.com/what/what.html
[23]http://www.robotdiy.com/article.php?sid=136
[24]http://www.takaratomy.co.jp/
[25]http://www.vecnarobotics.com/
[26]?田秀司編著,管貽生譯,2007,“仿人機器人”,清華大學出版社,北京。
[27]Roland Siegwart and Illah R. Nourbakhsh,2004,Introduction to Autonomous Mobile Robots Cambridge, Mass。









請先 登入 以發表留言。